Daniel Dauner
I am a PhD student at the University of Tübingen, where I am part of the Autonomous Vision Group and supervised by Prof. Andreas Geiger.
Interests: My research interest lies in the intersection of machine learning and robotics, where I am deeply fascinated by autonomous driving. Specifically, I am exploring data-driven simulation and representation learning for vehicle motion planning. My ultimate goal is to contribute to the realization of fully autonomous cars.
Bio: I received my BSc in Bioinformatics in 2021 and my MSc in Computer Science in 2023 (with distinction) at the University of Tübingen. The highlight of my master's education was developing a vehicle motion planner that won the 2023 nuPlan challenge. In 2024, I started my PhD at the Autonomous Vision Group, supervised by Prof. Andreas Geiger, and joined the International Max Planck Research School for Intelligent Systems.
For any inquiries, feel free to write an email!

Publications
Wei Cao*, Marcel Hallgarten*, Tianyu Li*, Daniel Dauner, Xunjiang Gu, Caojun Wang, Yakov Miron, Marco Aiello, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, Andreas Geiger, Kashyap Chitta
Conference on Robot Learning (CoRL), 2025
Paper / Supplemental / Code /
@inProceedings{Cao2025CORL,
author = {Wei Cao and Marcel Hallgarten and Tianyu Li and Daniel Dauner and Xunjiang Gu and Caojun Wang and Yakov Miron and Marco Aiello and Hongyang Li and Igor Gilitschenski and Boris Ivanovic and Marco Pavone and Andreas Geiger and Kashyap Chitta},
title = {Pseudo-Simulation for Autonomous Driving},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2025},
}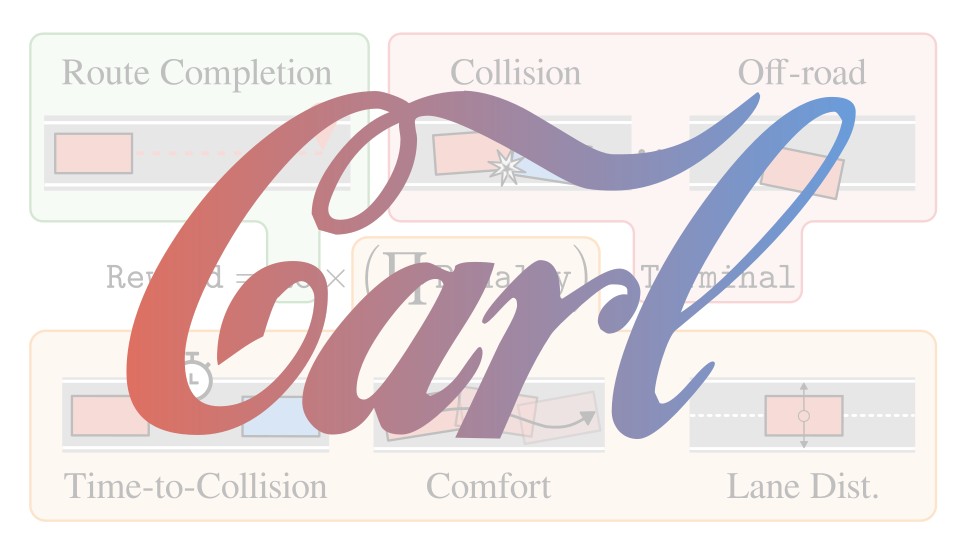
Bernhard Jaeger, Daniel Dauner, Jens Beißwenger, Simon Gerstenecker, Kashyap Chitta, Andreas Geiger
Conference on Robot Learning (CoRL), 2025
Paper / Video / Code /
@inProceedings{Jaeger2025CORL,
author = {Bernhard Jaeger and Daniel Dauner and Jens Beißwenger and Simon Gerstenecker and Kashyap Chitta and Andreas Geiger},
title = {CaRL: Learning Scalable Planning Policies with Simple Rewards},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2025},
}
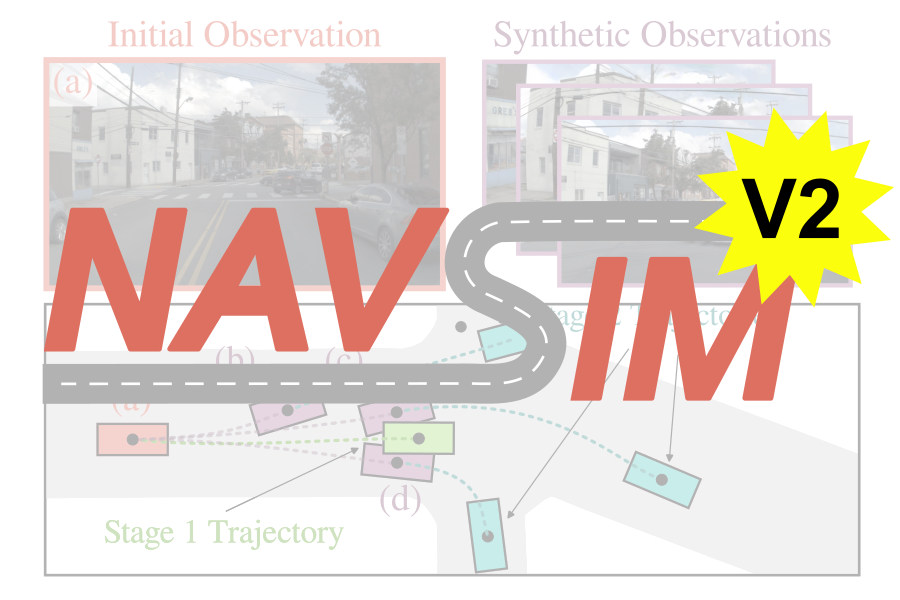
Daniel Dauner, Marcel Hallgarten, Tianyu Li, Xinshuo Weng, Zhiyu Huang, Zetong Yang, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, Andreas Geiger, Kashyap Chitta
Advances in Neural Information Processing Systems (NeurIPS), 2024
Paper / Supplemental / Poster / Code /
@inProceedings{Dauner2024NIPS,
author = {Daniel Dauner and Marcel Hallgarten and Tianyu Li and Xinshuo Weng and Zhiyu Huang and Zetong Yang and Hongyang Li and Igor Gilitschenski and Boris Ivanovic and Marco Pavone and Andreas Geiger and Kashyap Chitta},
title = {NAVSIM: Data-Driven Non-Reactive Autonomous Vehicle Simulation and Benchmarking},
booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
year = {2024},
}
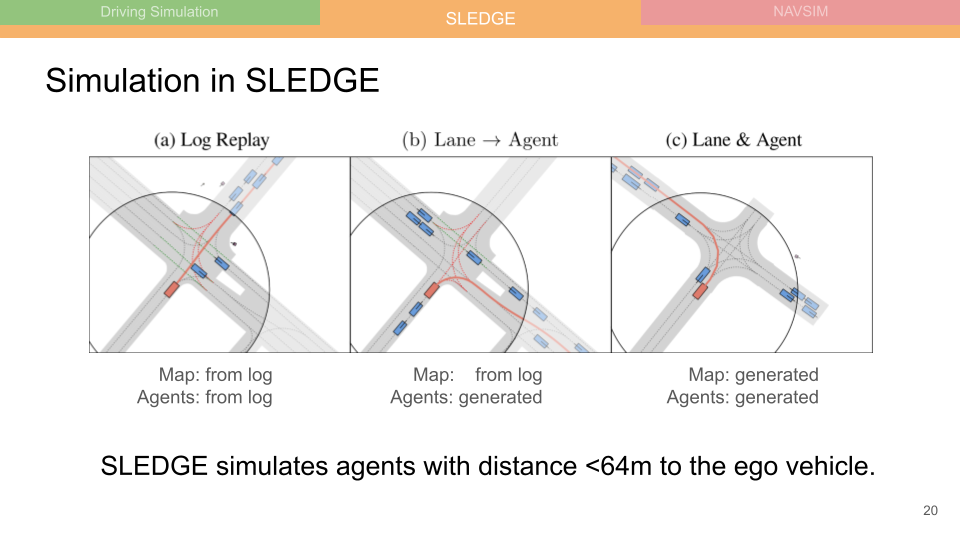
Kashyap Chitta*, Daniel Dauner*, Andreas Geiger
European Conference on Computer Vision (ECCV), 2024
Paper / Supplemental / Poster / Code /
@inproceedings{Chitta2024ECCV,
author = {Kashyap Chitta and Daniel Dauner and Andreas Geiger},
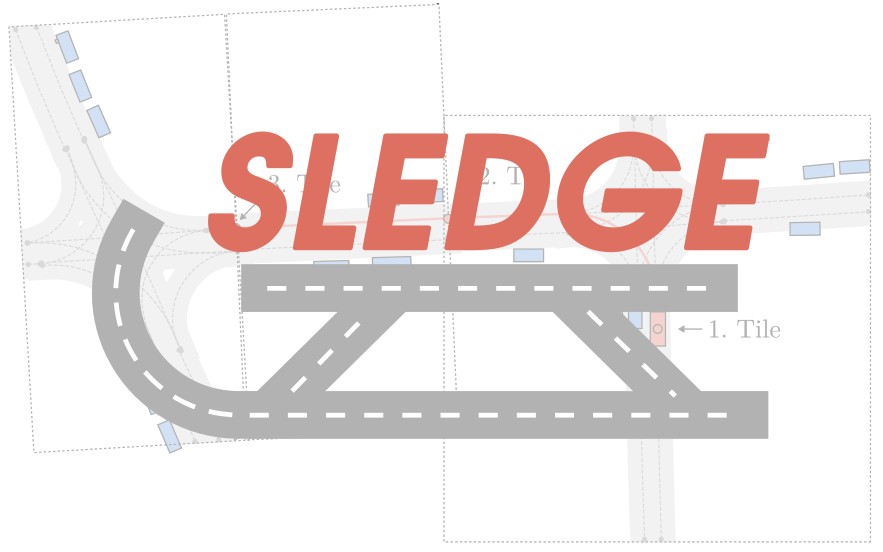
title = {SLEDGE: Synthesizing Driving Environments with Generative Models and Rule-Based Traffic},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2024},
}
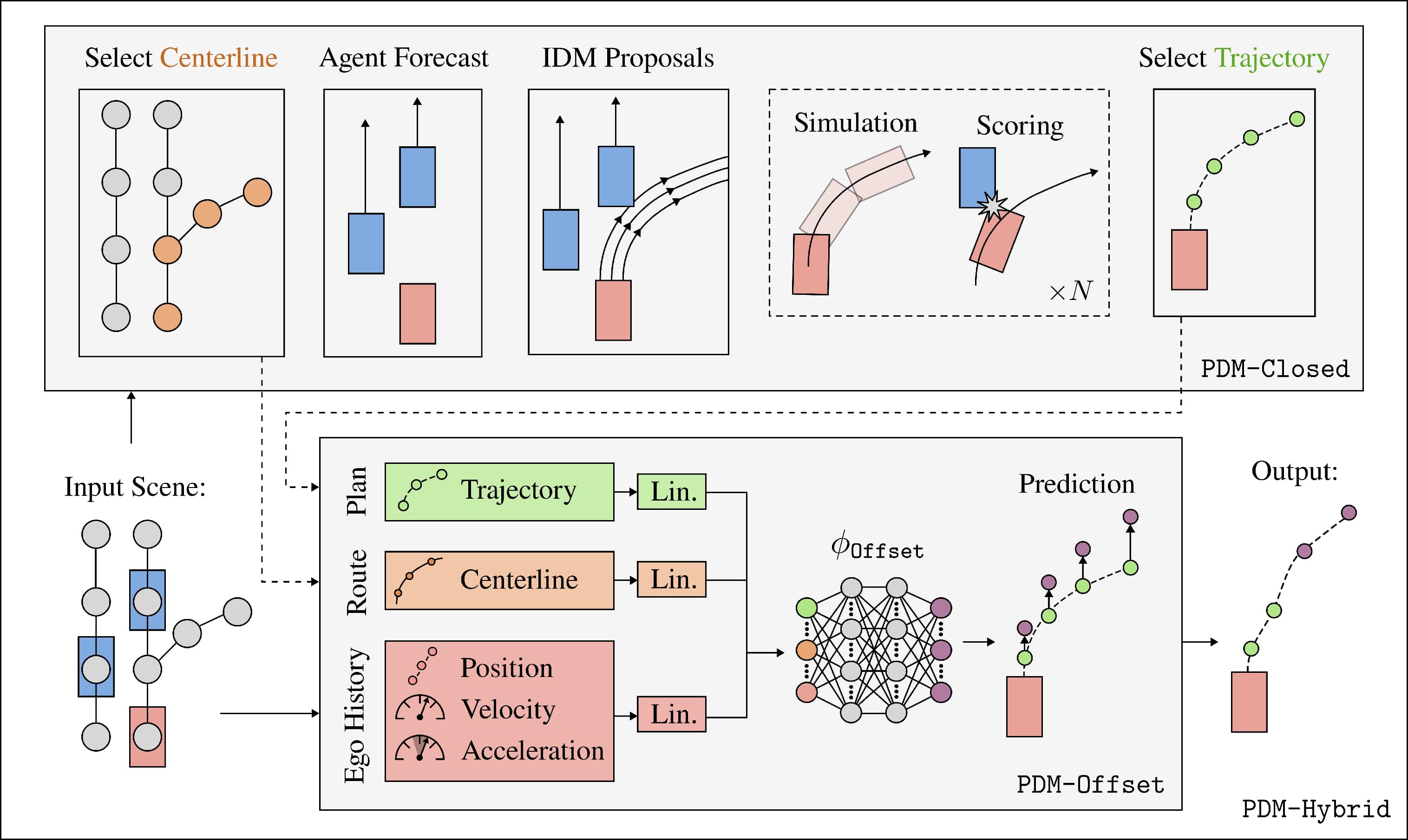
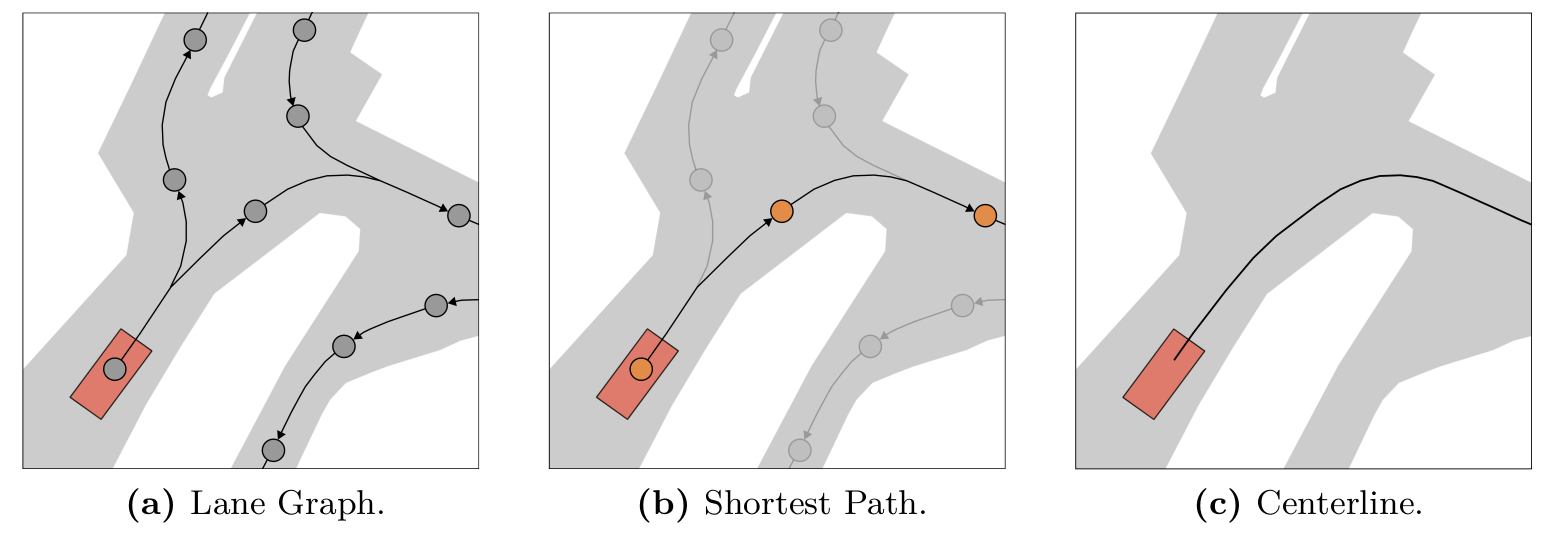
Daniel Dauner, Marcel Hallgarten, Andreas Geiger, Kashyap Chitta
Conference on Robot Learning (CoRL), 2023
Paper / Supplemental / Video / Poster / Code /
@inproceedings{Dauner2023CORL,
author = {Daniel Dauner and Marcel Hallgarten and Andreas Geiger and Kashyap Chitta},
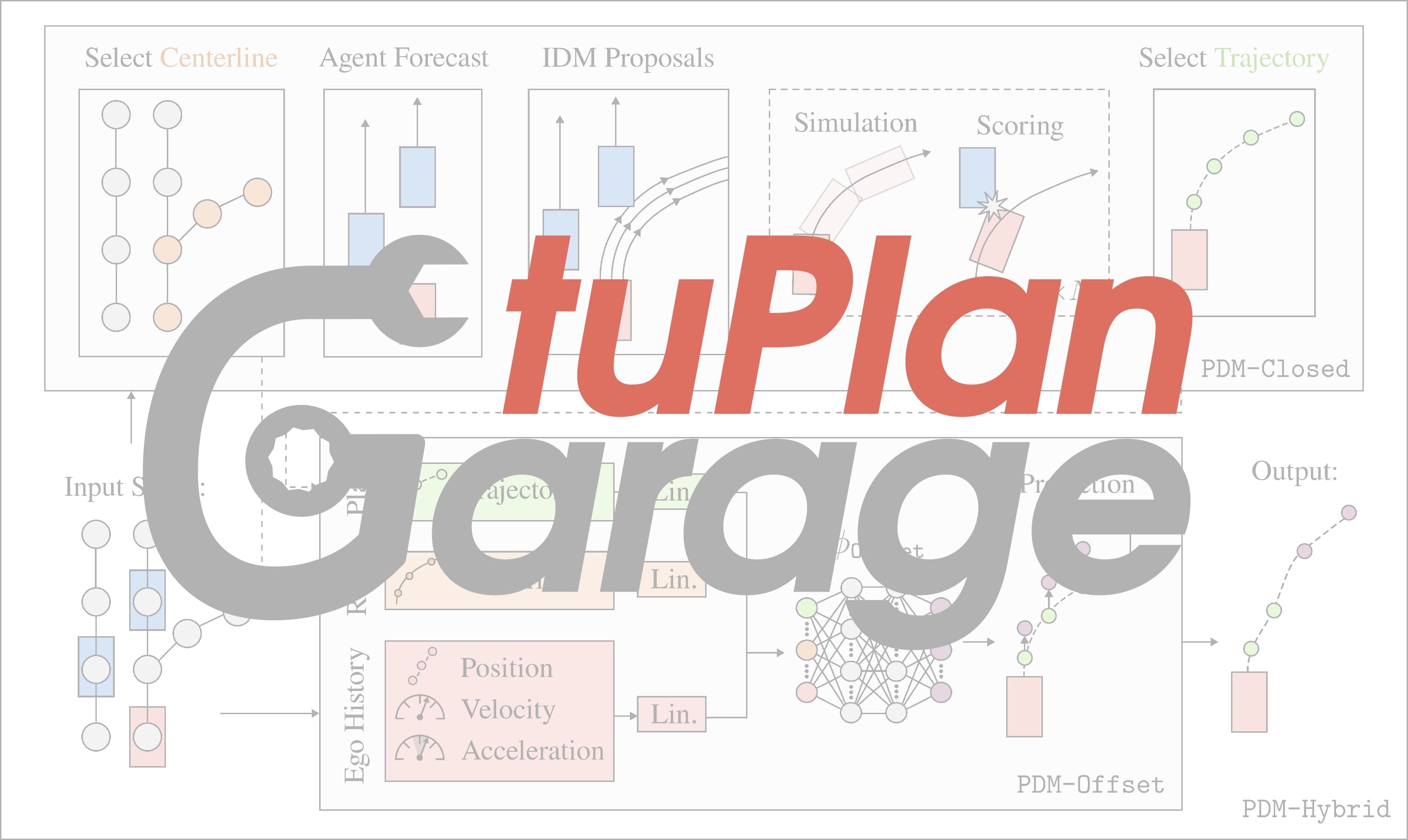
title = {Parting with Misconceptions about Learning-based Vehicle Motion Planning},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2023},
}
Daniel Dauner
International Conference on Learning Representations (ICLR) Workshop on Scene Representations for Autonomous Driving, 2023
Paper /
@inproceedings{Dauner2023ICLRW,
author = {Daniel Dauner},
title = {Image Reconstruction from Event Cameras for Autonomous Driving},
booktitle = {International Conference on Learning Representations (ICLR) Workshop on Scene Representations for Autonomous Driving},
year = {2023},
}
University Projects
Daniel Dauner
University of Tübingen, 2023
Paper / Code /
@mastersthesis{Dauner2023Master,
author = {Daniel Dauner},
title = {Vehicle Motion Planning using Data-Driven Simulation},
year = {2023},
school = {University of Tübingen},
}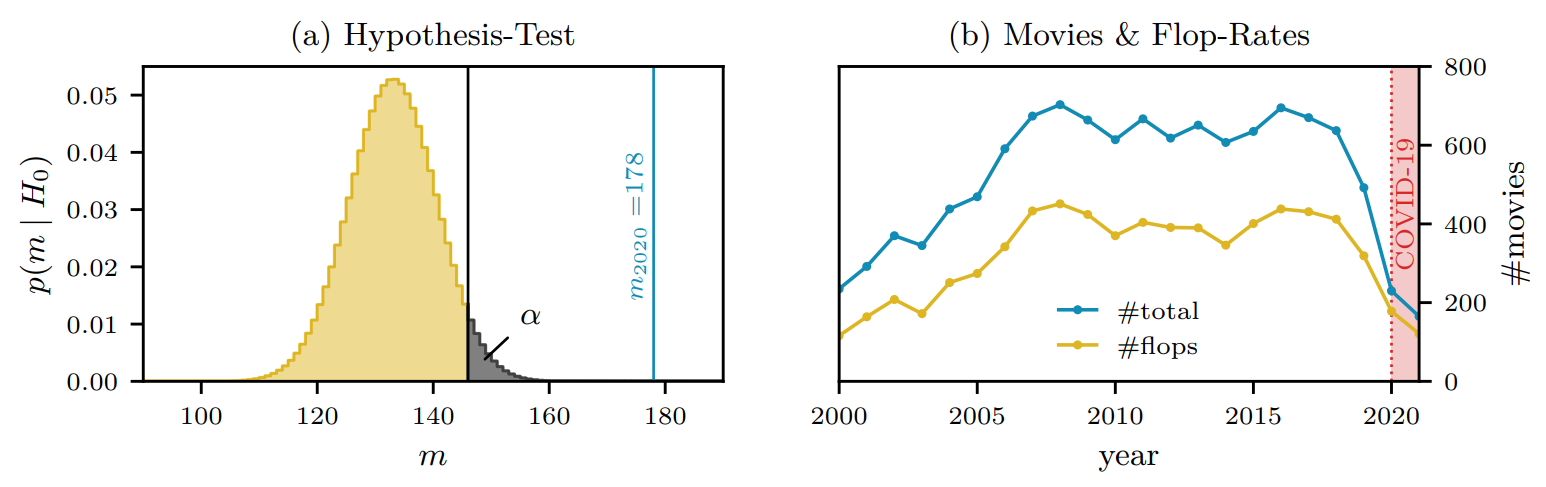
Bálint Mucsányi, Daniel Dauner
Project Work at the University of Tübingen, 2022
Paper / Code /
@inproceedings{Mucsanyi2022Datalit,
author = {Bálint Mucsányi and Daniel Dauner},
title = {Analyzing Influential Factors of a Successful Movie},
booktitle = {Project Work at the University of Tübingen},
year = {2022},
}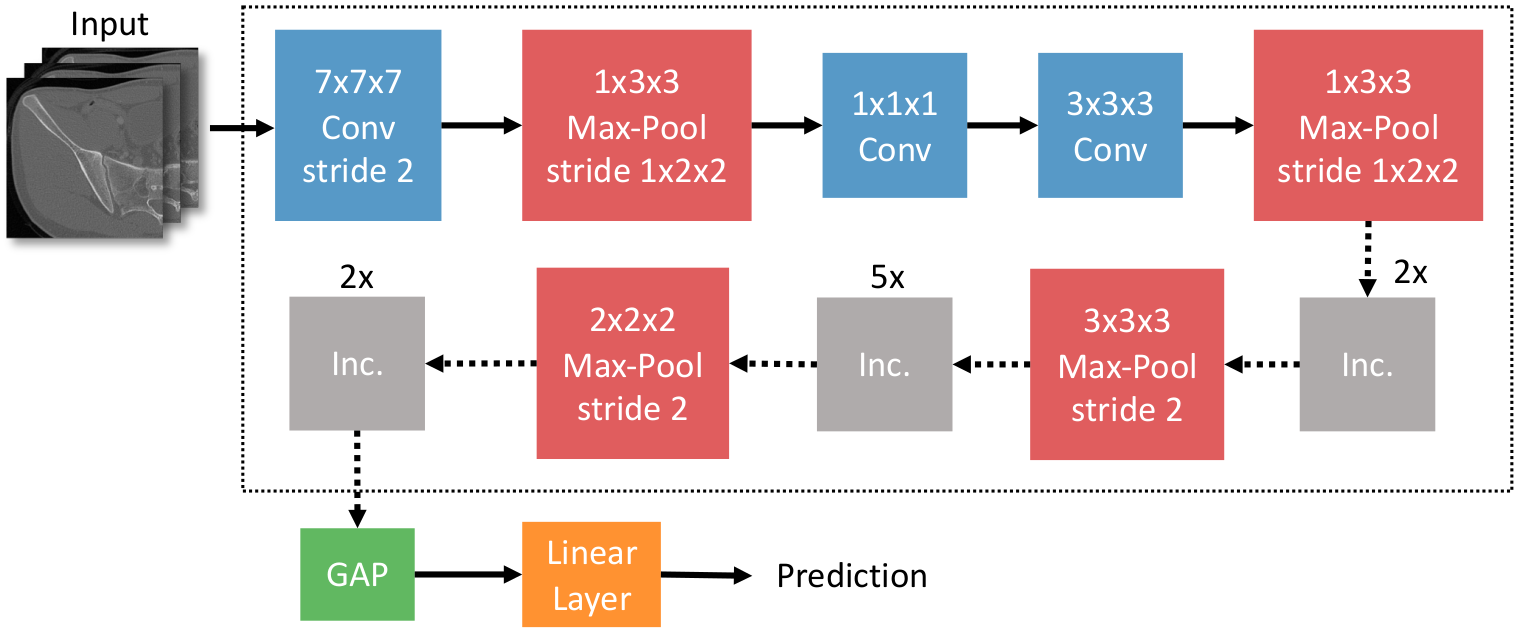
Daniel Dauner
University of Tübingen, 2021
Paper /
@bachelorsthesis{Dauner2021Bachelor,
author = {Daniel Dauner},
title = {Acetabulum Fracture Classification on a large Cohort of CT Images from German Hospitals using 3D CNNs},
year = {2021},
school = {University of Tübingen},
}Template
This page is based on the template of Michael Niemeyer. Checkout his GitHub repository for instructions on how to use it.